
Pilote de servomoteur Leadshine
Présentation du produit

1. Caractéristiques du pilote de moteur AUV
1.1. Réponse rapide
S'adapter immédiatement aux conditions de charge changeantes
Anneau de fonction rapide haute performance
Retour d'information en temps réel sur les performances
1.2. Stable et compatible
La tâche de traitement DSP est plus fiable et stable
Entièrement compatible avec les moteurs rotatifs et à entraînement direct tiers courants
1.3. Sûr et fiable
Réduisez le bruit et les exigences matérielles supplémentaires
La surveillance de la surtension, du courant et de la température offre une plus grande fiabilité
2. Scénarios d'application
Le servomoteur Leadshine peut être utilisé dans les machines-outils CNC, les équipements d'impression, les équipements d'emballage, les équipements de traitement, les robots autonomes, les lignes de production automatiques et d'autres domaines, pour répondre à différents besoins dans divers domaines, tels que l'industrie, la recherche scientifique, la finance, les hôpitaux, etc. . Largement application, assurance qualité, gros envois.
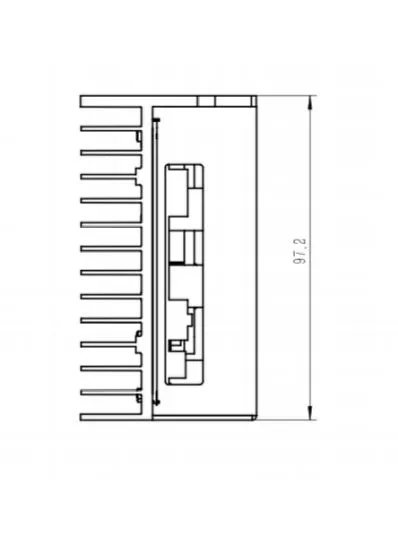
3. Tableau des paramètres
Paramètre | pilote servo leadshine | Personnalisé |
Taille | 112,5 * 90 mm | Personnalisé |
Tension | 18~60V | 18~60V |
Courant d'alimentation du contrôleur | 30A | 30A |
Puissance | 1500W | GG lt; 10Kw |
Capteur de soutien | Avec hall, encodeur incrémental (peut prendre en charge 4096 fils) | Pas de hall, avec hall, encodeur incrémental (peut prendre en charge 4096 fils) |
Protection d'exception | Rotor bloqué, sous-tension, surintensité | Rotor bloqué, sous-tension, surintensité |
Communication de signal | 485 | CAN / 485 |
Les paramètres ci-dessus sont à titre indicatif uniquement. Notre technologie de produit est constamment mise à jour et mise à niveau. Dans le même temps, nous acceptons également la personnalisation et le développement des clients.
4. Détails du produit


5. Usine et qualification




6. Instructions et précautions
Afin de prolonger la durée de vie du système d'asservissement, les problèmes suivants doivent être pris en compte lors du processus d'utilisation. Pour l'environnement de fonctionnement du système, la température, l'humidité, la poussière, les vibrations et la tension d'entrée doivent être prises en compte. Nettoyez régulièrement le système de refroidissement et de ventilation de la commande numérique. Vérifiez si les ventilateurs de refroidissement du dispositif de commande numérique fonctionnent normalement. L'inspection et le nettoyage doivent être effectués tous les six mois ou une fois par trimestre selon les conditions environnementales de l'atelier. Le servomoteur est une sorte de contrôleur utilisé pour contrôler le servomoteur. Sa fonction est similaire à celle du convertisseur de fréquence agissant sur un moteur à courant alternatif commun. Il appartient à une partie du système servo et est principalement utilisé dans le système de positionnement de haute précision. En général, le servomoteur est contrôlé par la position, la vitesse et le couple pour obtenir un positionnement de haute précision du système de transmission. À l'heure actuelle, c'est un produit haut de gamme de la technologie de transmission. Ensuite, comment tester et réparer le pilote d'asservissement, voici quelques méthodes:
Lorsque l'oscilloscope vérifie la sortie de surveillance du courant du pilote, il est constaté que tout est bruit et ne peut pas être lu
Cause du défaut: la sortie de surveillance du courant n'est pas isolée de l'alimentation CA (transformateur)
Méthode de traitement: un voltmètre CC peut être utilisé pour détecter et observer.
Le moteur tourne plus vite dans un sens que dans l'autre
Raison du défaut: la phase du moteur sans balais est fausse.
Méthode de traitement: détecter ou découvrir la phase correcte.
Raison du défaut: lorsqu'il n'est pas utilisé pour le test, le commutateur test / déviation est en position test.
Méthode de traitement: tournez le commutateur de test / déviation sur la position de déviation.
Cause du défaut: la position du potentiomètre de déviation est incorrecte.
étiquette à chaud: pilote servo leadshine, Chine, fabricants, fournisseurs, vente en gros, personnalisé, haute qualité
Envoyez demande